







 生成海报
生成海报











- 供货总量 : 不限
- 价格说明 : 议定
- 包装说明 : 不限
- 物流说明 : 货运及物流
- 交货说明 : 按订单
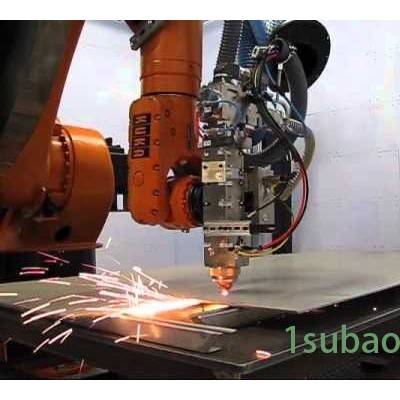
焊接机器人按结构坐标系来分
1) 直角坐标型 这类机器人的结构和控制方案与机床类似,其到达空间位置的三个运动(x、y、z)是由直线运动构成,焊接机器人,这种形式的机器人优点是运动学模型简单,各轴线位移分辨率在操作容积内任一点上均为恒定,控制精度容易提高;缺点是机构庞大,激光焊接机器人,工作空间小,操作灵活性较差。简易和焊接机器人常采用这种形式。2) 圆柱坐标型 这类机器人在基座水平转台上装有立柱,水平臂可沿立柱作上下运动并可在水平方向伸缩。这种结构方案的优点是末端操作可获得较高速度,缺点是末端操作器外伸离开立柱轴心愈远,自动焊接机器人,其线位移分辨精度愈低。3) 球坐标型 与圆柱坐标结构相比较,这种结构形式更为灵活。但采用同一分辨率的码盘检测角位移时,伸缩关节的线位移分辨率恒定,但转动关节反映在末端操作器上的线位移分辨率则是个变量,增加了控制系统的复杂性。4) 全关节型 全关节型机器人的结构类似人的腰部和手部,其位置和姿态全部由旋转运动实现,其优点是机构紧凑,灵活性好,占地面积小,工作空间大,全自动焊接机器人,可获得较高的末端操作器线速度;其缺点是运动学模型复杂,高的精度控制难度大,空间线位移分辨率取决于机器人手臂的位姿。
弧焊机器人除前面提及的在作“之”字形拐角焊或小直径圆焊缝焊接时,其轨迹应能贴近示教的轨迹之外,还应具备不同摆动样式的软件功能,供编程时选用,以便作摆动焊,而且摆动在每一周期中的停顿点处,机器人也应自动停止向前运动,以满足工艺要求。此外,还应有接触寻位、自动寻找焊缝起点位置、电弧跟踪及自动再引弧功能等。
点焊机器人的焊接装备,由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以变压器必须尽量小型化。对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接。焊接参数由定时器调节。新型定时器已经微机化,因此机器人控制柜可以直接控制定时器,无需另配接口。点焊机器人的焊钳,通常用气动的焊钳,气动焊钳两个电极之间的开口度一般只有两级冲程。而且电极压力一旦调定后是不能随意变化的。
全自动焊接机器人-焊接机器人- 常州柯勒玛智能4(查看)由常州柯勒玛智能装备有限公司提供。常州柯勒玛智能装备有限公司是江苏 常州 ,工业自动控制系统及装备的见证者,多年来,公司贯彻执行科学管理、创新发展、诚实守信的方针,满足客户需求。在常州柯勒玛领导携全体员工热情欢迎各界人士垂询洽谈,共创常州柯勒玛更加美好的未来。
衬氟蝶阀 T211-A原装正品直销速发货")








